Sensors, Free Full-Text
Por um escritor misterioso
Last updated 28 julho 2024
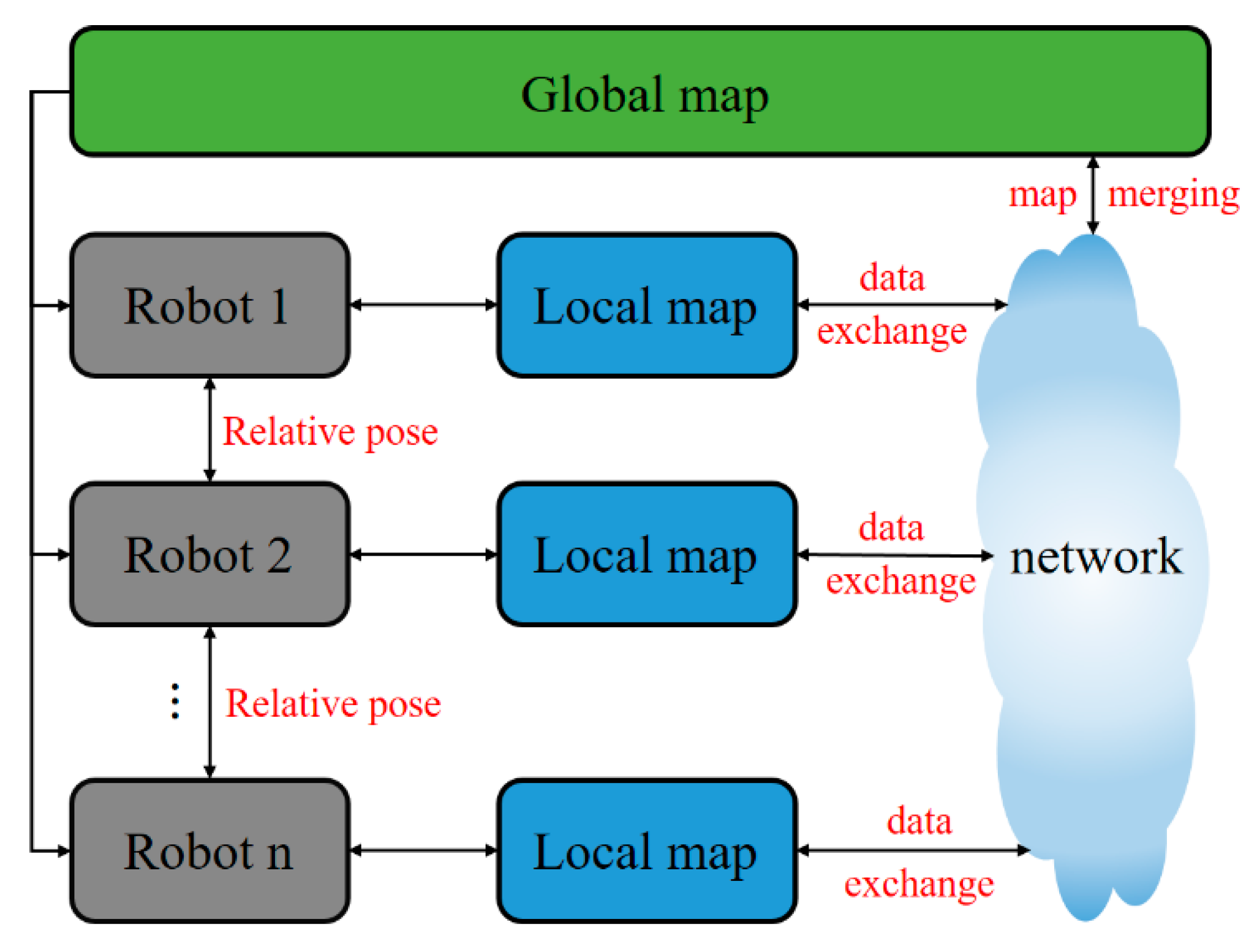
When multiple robots are involved in the process of simultaneous localization and mapping (SLAM), a global map should be constructed by merging the local maps built by individual robots, so as to provide a better representation of the environment. Hence, the map-merging methods play a crucial rule in multi-robot systems and determine the performance of multi-robot SLAM. This paper looks into the key problem of map merging for multiple-ground-robot SLAM and reviews the typical map-merging methods for several important types of maps in SLAM applications: occupancy grid maps, feature-based maps, and topological maps. These map-merging approaches are classified based on their working mechanism or the type of features they deal with. The concepts and characteristics of these map-merging methods are elaborated in this review. The contents summarized in this paper provide insights and guidance for future multiple-ground-robot SLAM solutions.

Bosch 0261230093 Original Equipment Fuel Pressure

BOSCH Professional GIS 1000 C Thermo Bluetooth Thermal Camera
Sensors, Free Full-Text
Sensors, Free Full-Text

Sensaphone IMS Solution water sensor - IMS-4830E - Proximity Cards
Tekscan Technology
Kidde Firex Smoke Detector, Hardwired with nine-V Battery Backup
Sensors, Free Full-Text

data storage in iot –

Bosch 0261230093 Original Equipment Fuel Pressure

CGM Free Trial Sign Up for the MyFreeStyle Program
Recomendado para você
-
 Duda Ferrão Games28 julho 2024
Duda Ferrão Games28 julho 2024 -
 VENCI O DESAFIO NO CORRIDOR OF HELL28 julho 2024
VENCI O DESAFIO NO CORRIDOR OF HELL28 julho 2024 -
 Duda Ferrão Games28 julho 2024
Duda Ferrão Games28 julho 2024 -
 Duda Ferrão Games28 julho 2024
Duda Ferrão Games28 julho 2024 -
Eduarda Ferrão - Latest version for Android - Download APK28 julho 2024
-
china nao queria fuga #fivemrp #grotarp #luanz7 #complexorp28 julho 2024
-
 Notícias da UFSC28 julho 2024
Notícias da UFSC28 julho 2024 -
 Resumo do dia 4 dos JOGOS PAN-AMERICANOS 2023 - Surto Olímpico28 julho 2024
Resumo do dia 4 dos JOGOS PAN-AMERICANOS 2023 - Surto Olímpico28 julho 2024 -
Dota 2 - Available now to all Battle Pass owners who reach level28 julho 2024
-
 Sustainability, Free Full-Text28 julho 2024
Sustainability, Free Full-Text28 julho 2024



você pode gostar
-
 How to Draw Baraka, Mortal Kombat 1128 julho 2024
How to Draw Baraka, Mortal Kombat 1128 julho 2024 -
 Mini Game Portátil MAY-011 - Tomate28 julho 2024
Mini Game Portátil MAY-011 - Tomate28 julho 2024 -
 Image 2 - Peppers, Please mod for Papers, Please - Mod DB28 julho 2024
Image 2 - Peppers, Please mod for Papers, Please - Mod DB28 julho 2024 -
 New John Doe hack (pastebin) check desk28 julho 2024
New John Doe hack (pastebin) check desk28 julho 2024 -
 Corey Kent - Call It a Night (Official Audio)28 julho 2024
Corey Kent - Call It a Night (Official Audio)28 julho 2024 -
 Teogonia Manga28 julho 2024
Teogonia Manga28 julho 2024 -
 Igarashi Futaba Nendoroid Figure -- Senpai ga Uzai Kouhai no Hanashi28 julho 2024
Igarashi Futaba Nendoroid Figure -- Senpai ga Uzai Kouhai no Hanashi28 julho 2024 -
 ChutzPah (TV Series 2019– ) - IMDb28 julho 2024
ChutzPah (TV Series 2019– ) - IMDb28 julho 2024 -
 Shadow legends stickman fight APK for Android Download28 julho 2024
Shadow legends stickman fight APK for Android Download28 julho 2024 -
 SCP-1730, SCP Facility Lockdown Wiki28 julho 2024
SCP-1730, SCP Facility Lockdown Wiki28 julho 2024